-
俯仰角(Pitch),是描述物体在三维空间中上下倾斜姿态的核心角度,与滚转角(Roll)、偏航角(Yaw) 共同构成描述物体姿态的欧拉角。...
-
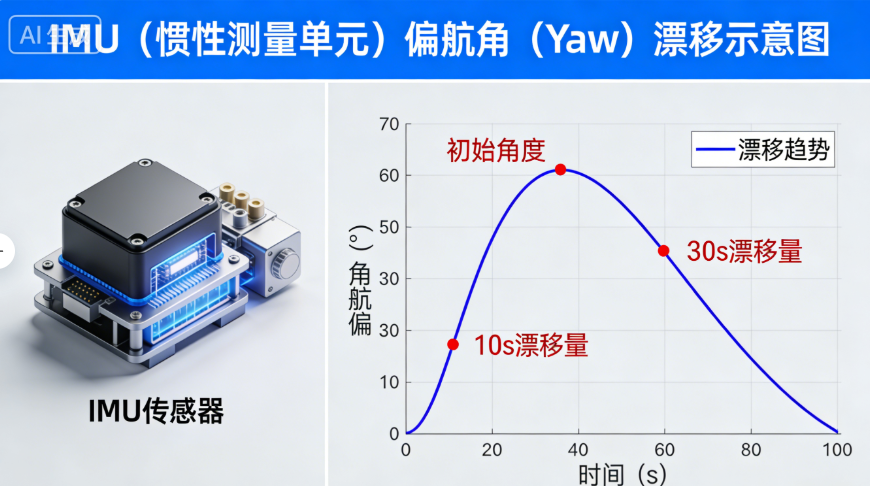
IMU(惯性测量单元)的偏航角(Yaw)漂移是一个长期存在的技术挑战,其根本原因在于仅依靠陀螺仪和加速度计无法提供偏航角的绝对参考。...
-
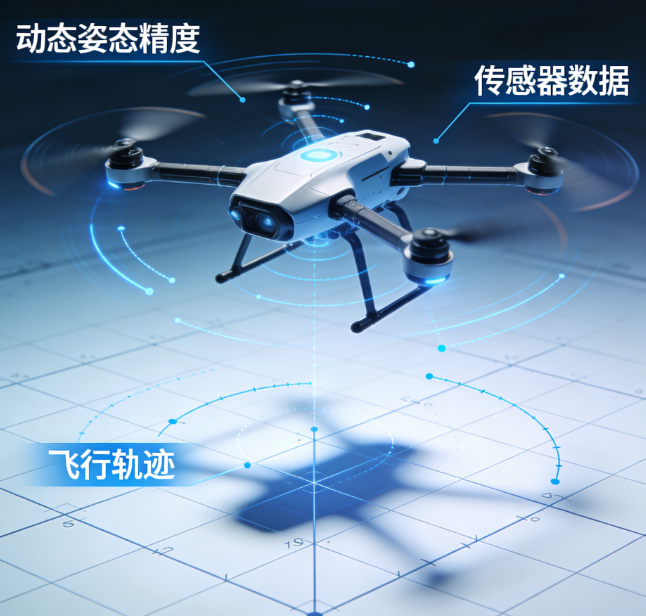
动态姿态精度是衡量动态场景中,测量系统对物体空间姿态(如角度、位置、运动轨迹)持续监测与输出准确性的核心指标,广泛应用于工业运维、运动科学、机器人技术等多领域,是保障设备运行、动作捕捉可靠性的关键参数。与静态姿态精度侧重静止状态下的测量准确性不同,其核心特点是适配物体运动过程,需兼顾时序连续性与数据真实性。...
-
在全球集装箱海运体系中,船舶稳定性直接关乎货物安全与航行合规,而倾角传感器的精准应用,为破解集装箱移位、倾覆等风险提供了智能化解决方案。尤其随着2026年IMO新规定生效,3000总吨以上集装箱船强制配备电子倾斜仪,倾角监测已成为船舶安全管控的核心环节,其在集装箱层面的深化应用更具现实意义。...
-
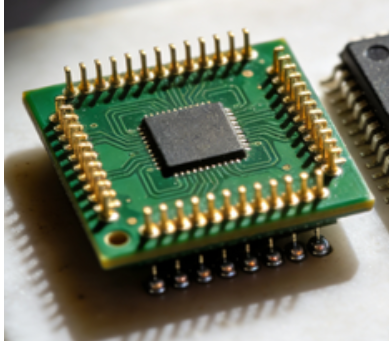
STM32是意法半导体推出的32位微控制器(MCU)系列,以ARM Cortex-M内核为核心,集成CPU、内存、定时器及多种外设接口,是嵌入式系统的核心控制单元。其产品线丰富,覆盖从入门级到高性能型号,兼具低功耗、高性价比与强兼容性,广泛应用于工业控制、智能家居、物联网设备等场景,既是新手入门嵌入式开发的优选,也是工业量产的主流方案。...
-
在自动驾驶技术向高阶演进的过程中,车辆对自身姿态与行驶环境的精准感知,是实现安全、稳定决策的前提。倾角传感器作为核心感知元件之一,凭借对车身倾斜角度、姿态变化的实时精准监测,为自动驾驶系统提供关键数据支撑,贯穿定位、控制、决策全流程,成为自动驾驶车辆不可或缺的“姿态感知核心中枢”。...
-
倾角传感器,又称倾斜仪、测斜仪,是一种基于惯性原理,能够精准测量物体相对于水平面倾斜角度的传感器。它通过内置的加速度计或陀螺仪,将角度变化转化为电信号输出,具备体积小、精度高、抗干扰能力强等特点。如今,倾角传感器已从工业领域逐步渗透到民生、交通、基建等多个场景,成为设备姿态监测、安全预警的核心元器件。...
-
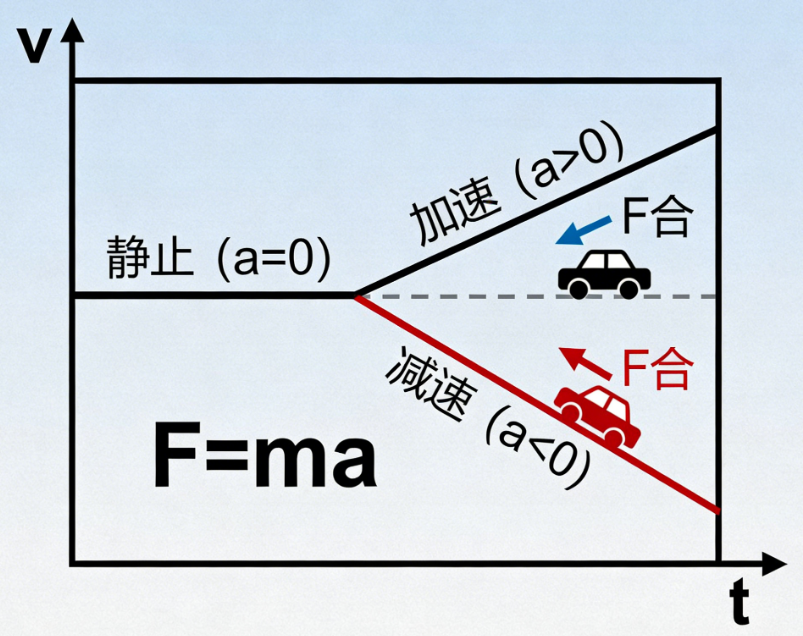
惯性和加速度是力学中紧密关联却又截然不同的核心概念,二者共同揭示了物体运动状态变化的规律。简单来说,惯性是物体抵抗运动状态变化的固有属性,加速度是物体运动状态变化的具体表现,外力是连接二者的关键桥梁,理解它们的关系需从概念本质和物理规律两方面入手。...
-
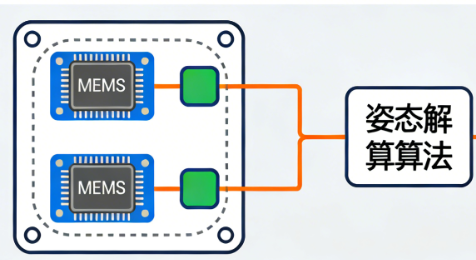
MEMS(微机电系统)是融合微机械加工、微电子技术的微型智能系统,通过将机械结构、传感器、执行器与电路集成于微小芯片,实现对物理量的高精度感知与控制。IMU(惯性测量单元)作为获取载体运动状态的核心器件,其核心功能是测量物体的角速度和线加速度,而MEMS技术的引入,彻底革新了IMU的发展格局,成为现代IMU实现小型化、低成本、低功耗的关键支撑。...
-
表面组装技术(SMT,Surface Mount Technology)扮演着核心角色。作为现代电子制造的主流工艺,SMT是一种将无引脚或短引线的片状元器件(SMC/SMD)直接贴装到印制电路板(PCB)表面,再通过焊接工艺实现电气连接的组装技术,它彻底改变了传统插件焊接的局限,推动电子产业迈入微型化、高密度的新时代。...