二、IMUi610/611DEMO与设备连接
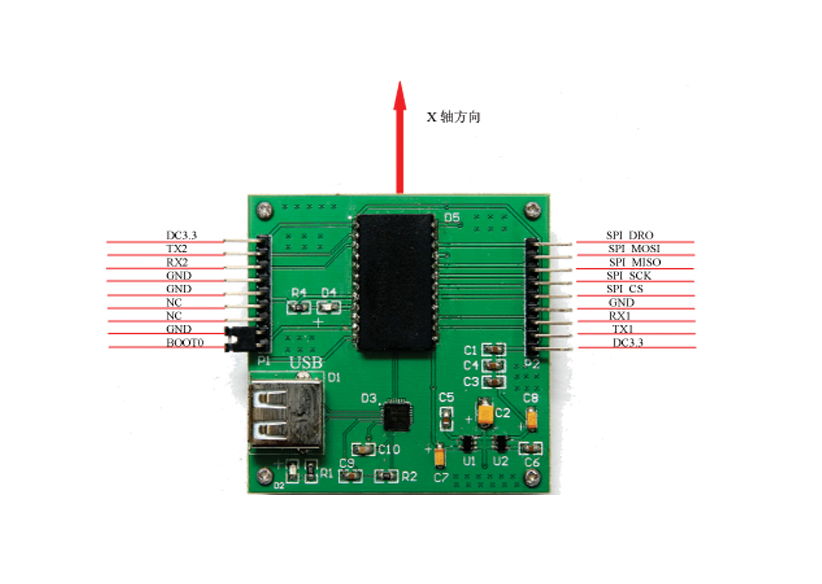
IMUi610/611DEMO与工业自动化控制设备连接时,应通过板上TTL电平接口经过TTL转RS232转换模块进行转换,再将模块上的DB型9针接口与设备串口连接,连接时请注意DB9的公母相配。IMUi610/611DEMO信号输出默认串口1,请将TX1与转换模块RX相连,RX1与转换模块TX相连,DC3.3与转换模块VCC相连,GND与转换模块GND相连,连接距离在20cm内可用杜邦线,超过20cm须用屏蔽信号线。
IMUi610/611DEMO通过板上的USB接口取电,输入电压为5V。用户根据工控设备电压选择转接模块,假设工控设备电压为24V,则选择24V转5V的USB口输出转接模块,将该模块输入端接工控设备电源,输出端接IMUi610/611DEMO板USB口,连接时请注意USB的公母相配。
三、IMUi610/611DEMO数据读取与换算
IMUi610/611DEMO输出的是原始ADC数据,客户在读取和使用数据时需要进行姿态数据换算。在客户的控制系统软件程序中进行相应的设置。
换算方法:
步骤一:设置传感器量程。可以在仿真系统参数设置中直接设置;
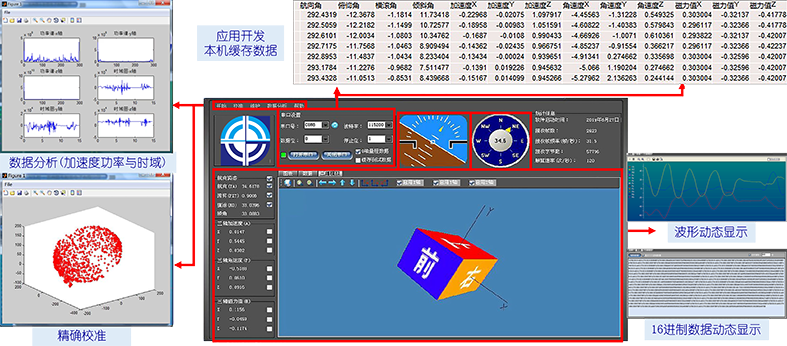
步骤二:将IMUi610/611DEMO输出的十六进制ADC数据转换为十进制数据(已包含正负)。
步骤三:将十进制数据按选定的量程在中对应其分辨率,以此数据除以分辨率即得到可以使用的姿态数据,其中加速度单位为g,角速度单位为°/s,磁场强度单位为mGauss。姿态角即俯仰角、横滚角、航向角为直接输出包含正负的角度数据,可以直接使用,不需要对应分辨率,单位为 °。
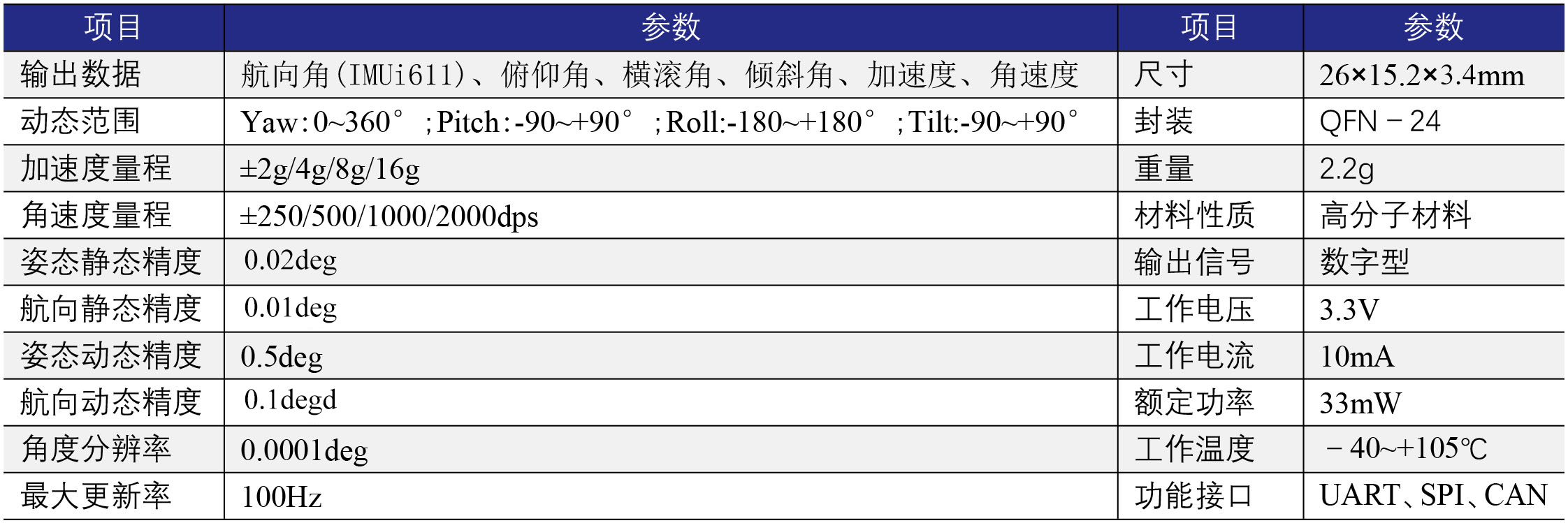
附:IMUi610/611运动姿态传感器微系统芯片主要性能参数