-
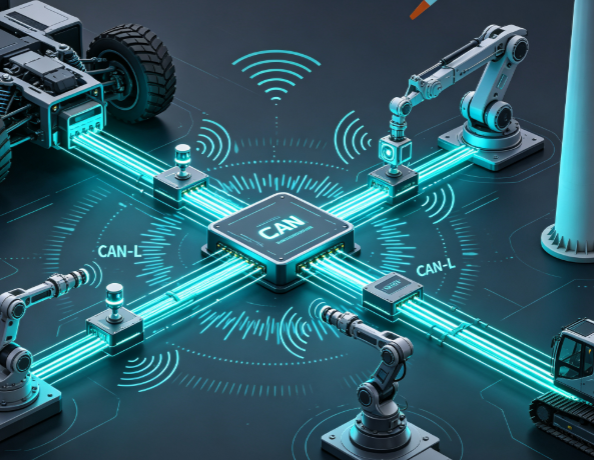
在车载电子、工程机械、工业机器人等对实时性和可靠性要求严苛的领域,惯性传感器的数据传输不能有丝毫延迟与差错。CAN 总线凭借其独特的通信机制,成为高动态场景下惯性传感数据传输的主流方案。...
-
在工业自动化、工程机械、智慧矿山等领域,惯性传感器承担着姿态监测、倾角测量、振动预警等核心任务。而在众多通信方案中,RS485 接口凭借其独特的物理层特性,成为恶劣工业环境下惯性数据传输的首选方案之一。...
-
在惯性测量单元(IMU)、光纤陀螺仪及组合导航系统的工程应用中,通信接口的选择直接决定了数据传输的可靠性与实时性。RS-422 作为一种成熟的差分串行通信标准,凭借其卓越的抗干扰能力和长距离传输特性,成为工业级与军工级惯性传感器的首选通信方案之一。...
-
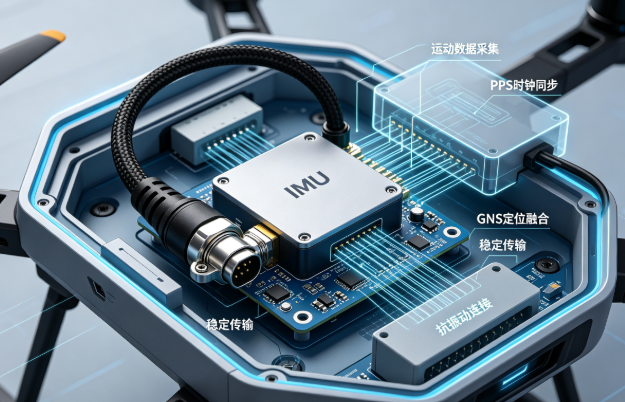
惯性测量单元(IMU)是无人机、自动驾驶设备、航空航天飞行器、工业惯性导航系统的核心感知部件,依靠加速度计、陀螺仪采集高精度运动数据,为姿态解算、轨迹定位、运动控制提供核心数据支撑。...
-
赫兹(Hz)是国际单位制的频率基本单位,定义为每秒周期性事件的循环次数,1Hz即1次/秒,是衡量周期信号快慢的核心物理量。该单位广泛应用于各类传感、测控与电子系统,在惯性导航领域,赫兹是决定导航精度、响应速度与动态性能的关键参数,直接影响惯性测量单元(IMU)的工作状态与导航解算效果。...
-
9轴倾角传感器技术原理与应用概述9轴倾角传感器是现代智能感知领域的核心惯性测量器件,属于高精度复合型姿态传感设备,是在6轴传感器基础上迭代升级的产物。其核心优势在于能够全方位、高精度捕捉物体在三维空间内的运动状态与倾角姿态,彻底解决了传统单轴、多轴传感器测量维度单一、数据漂移、静态动态适配性差等问题,广泛应用于工业测控、智能导航、人机交互、工程监测等多个领域,是实现设备智能化姿态感知与运动控制的关键硬件。...
-
...
-
姿态传感器中的 9 轴简介9 轴姿态传感器(又称 9 轴 IMU 惯性测量单元)是集成三轴加速度计、三轴陀螺仪与三轴磁力计的微型 MEMS 器件,可全方位感知物体三维空间姿态与运动状态,是智能设备的 “空间感知核心”。...
-
SPI(串行外设接口)是由摩托罗拉公司推出的同步串行通信总线协议,也是微控制器(MCU)与各类外围设备交互最常用的接口之一。凭借传输速率高、硬件逻辑简单、稳定性强等优势,它广泛应用于传感器、显示屏、闪存、模数转换器、驱动芯片等外设连接场景,是嵌入式系统中不可或缺的通信方式。...
-
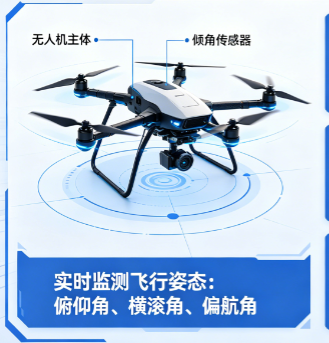
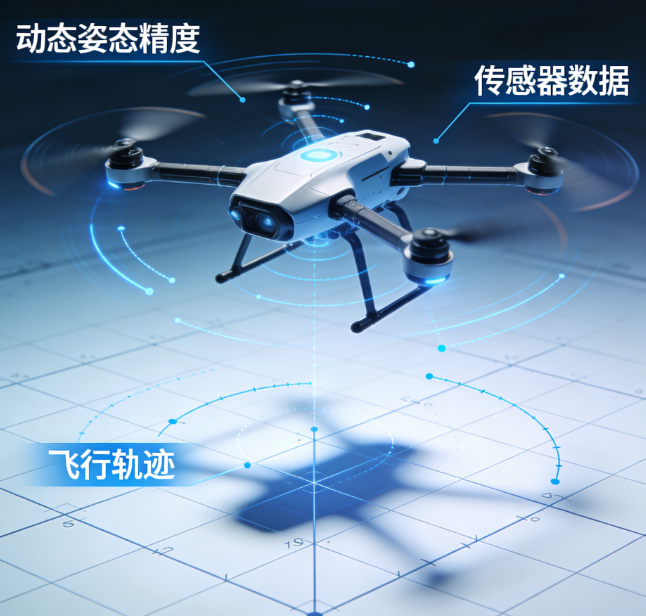
运动姿态传感器是依托微机电系统(MEMS)技术打造的高精度三维运动感知器件,也是现代智能设备、运动监测、智能控制领域的核心感知硬件。它能够实时捕捉物体或人体在三维空间内的运动参数,精准解算俯仰、横滚、航向三大姿态角度,全方位记录位移、转速、倾斜、震动等动态运动状态,具备自主感知、响应迅速、体积小巧、功耗极低的核心优势,广泛应用于智能穿戴、体育科研、机器人、无人机、智能驾驶等诸多领域,是实现设备智能化、运动数据精细化分析的关键基础器件。...